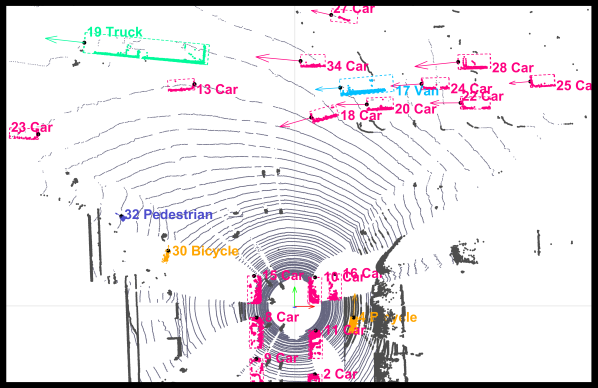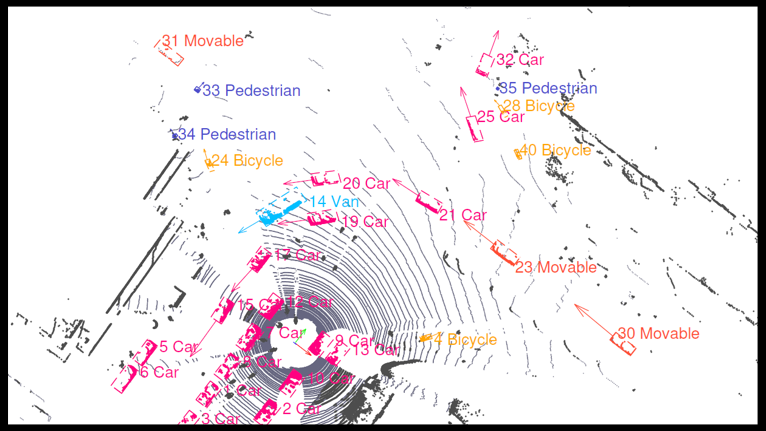
Labeled Laser Scans
The TUBS dataset provides road users labels within the scanner's entire field of view, taken in the inner city of Braunschweig, Germany.
Estimated Dynamics
We provide estimated dynamics, such as velocity, acceleration and yaw rate, for every labeled road user - including variances.
Open Source Tooling
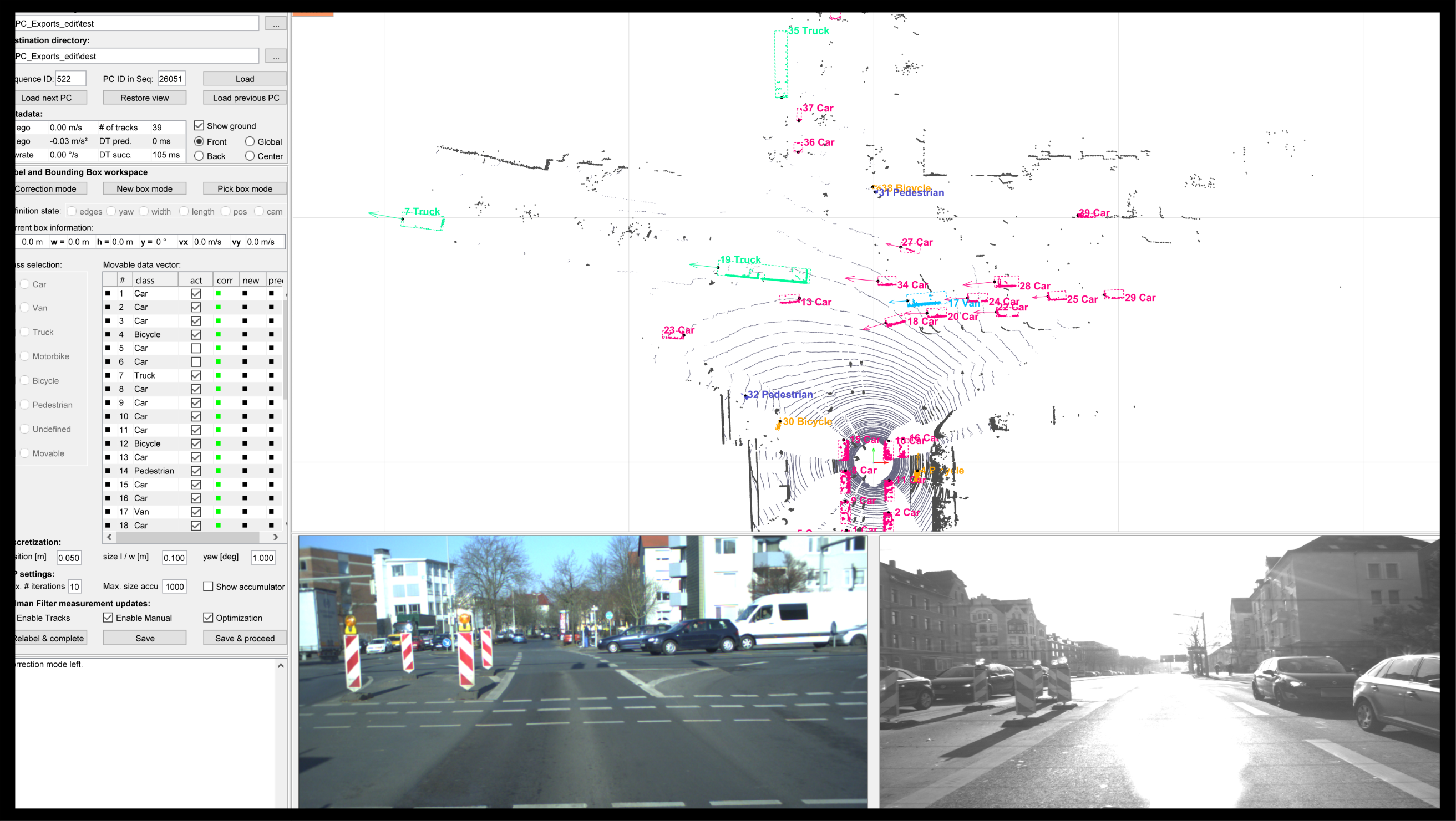
Our open source labeling tool is designed to minimize editing effort by using tracking and optimization algorithms.
News
June 26th, 2019
Our dataset and labeling tool are now available. Register here to obtain the login information needed to download the dataset. Our labeling tool is published on GitHub. An example reading the data format as well as our license plate and face detection system can be found on our tooling page. We also added a documentation of the data format.

Overview
The TUBS Road User Dataset is a LiDAR and image dataset suitable for road user perception tasks, such as segmentation, detection or tracking. Our aim is to provide the largest LiDAR and image dataset that is publicly available. Therefore, our labeling tool is open source.
Size and properties
- TUBS: 32,500 automatically labeled scans with 97,500 corresponding images
- TUBS PC Only: 136,400 automatically labeled scans
- 7 classes: car, van, truck, motorbike, pedestrian, bicycle and generally movable
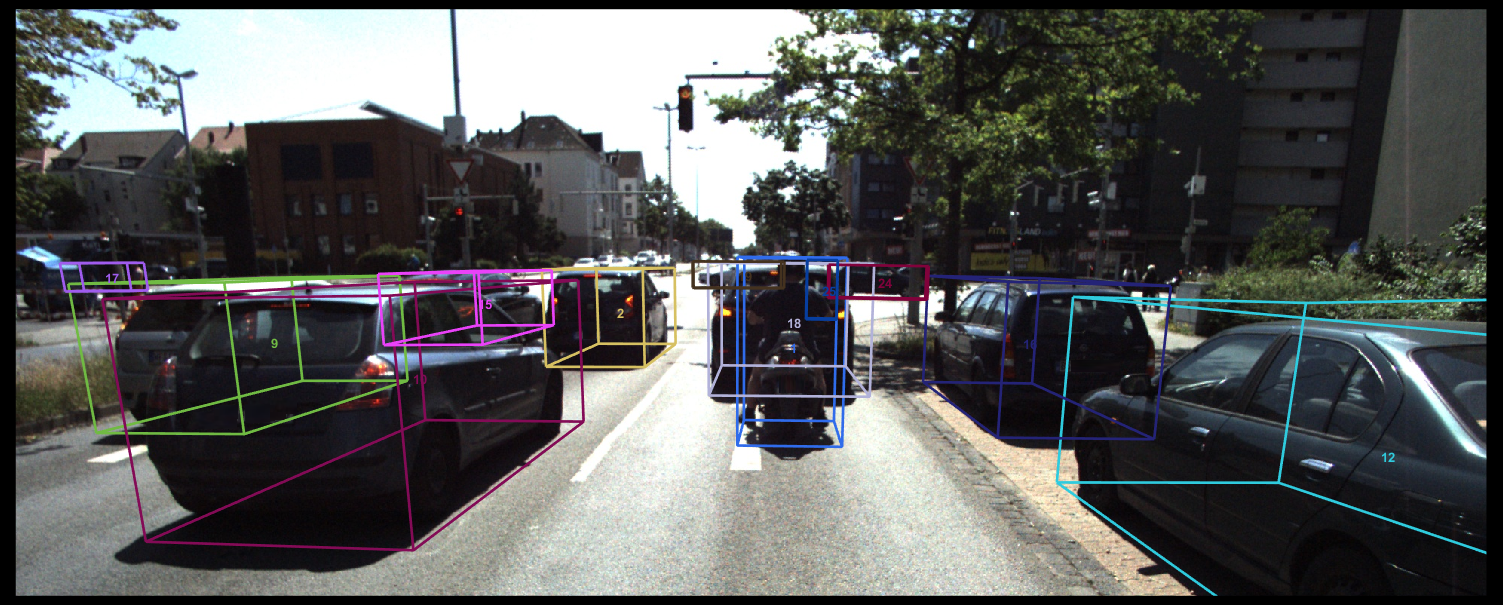
- 400 manually edited point clouds and 1,200 labeled images, generated in 6 h using our tool
- Estimated dynamics (e.g. velocity, acceleration and yaw rate)
- Geo locations and ego dynamics for every sample
Note that neural networks trained with automatically data can achieve similar results as compared to a training with manually labeled data (see our ITSC18 paper). In order to provide more manually labeled scans and images for evaluation or training, we encourage the users of our labeling tool and dataset to share their work by contacting us.
Sensor setup
- Main sensor: Velodyne HDL-64E (64 vertical layers, 2000 channels)
- 4 Allied Vision Prosilica GT cameras, providing a near 360° field of view
- Hardware synchronization between rotating Velodyne and cameras
- Intrinsic and extrinsic calibration data (e.g. orientation of cameras and scanner)
- GNSS and IMU system (iTraceRT-F400 + odometry)